

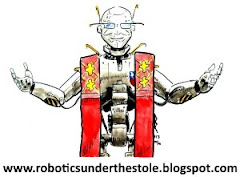
Here is the latest picture of my Stingray Robot. I have added three Ping))) detectors and three rack handles for bumpers (like Parallax's Chris Savage did on his prototype). Parallax has a kit to do this (less the rack handles) and you can see it here. A video is also at this link.
The test code that I am using is giving me some problems and I haven't figured it out yet. The left motor spins in reverse when it should go forward. Some people are correcting this by reversing the connections, but I want to understand what is going on first. I will post my own video of it roaming when I get it working.
Update: I have it working now! I've made a lot progress understanding the code and how it works. Thanks to all the Parallax Forum members who helped! Video will follow...


No comments:
Post a Comment